冗余机器人作为智能制造、救灾抢险与太空探索等领域的关键环节,近年来逐渐成为控制领域的最热门研究方向之一。然而,对结构信息不准确或未知的冗余机器人进行运动规划是一个棘手的问题。此外,若不考虑冗余机器人末端执行器的姿态约束,可能会因姿态的不可控性导致任务失败。
重庆研究院大数据与无人系统研究团队针对许多现有机器人控制方法依赖精确的结构信息、未考虑特定任务末端姿态要求、速度信号难以应用于实物机器人等问题,研究了基于数据驱动的冗余机器人双层运动控制规划。该研究通过数据驱动技术实时学习机器人的结构信息,并增加了姿态保持约束以控制末端的姿态,同时提出了双层运动规划方案,实现了加速度控制信号的输出,最后通过离散神经动力学求解器实现了对方案的求解。
该研究最终实现了对结构信息未知冗余机器人的运动规划以及末端的姿态控制。相关成果发表于国内高水平期刊《中国科学:信息科学》上。本研究工作得到了国家自然科学基金项目资助。
相关论文索引:
刘梅,尚明生. 数据驱动的冗余机器人双层运动规划. 中国科学:信息科学,2024,54(4):960–975. DOI: 10.1360/SSI-2023-0100
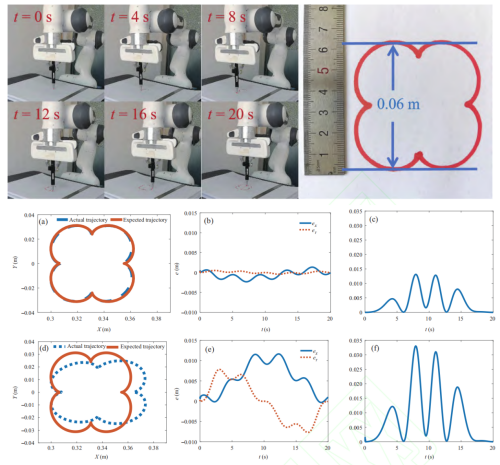
实物实验及对比实验结果图